-
3Dプリンター
- 投稿日:2023.2.17
- 更新日:2026.1.8
【Guider3】水平出しのやり方
水平出しの手順
1. 電源を起動します。
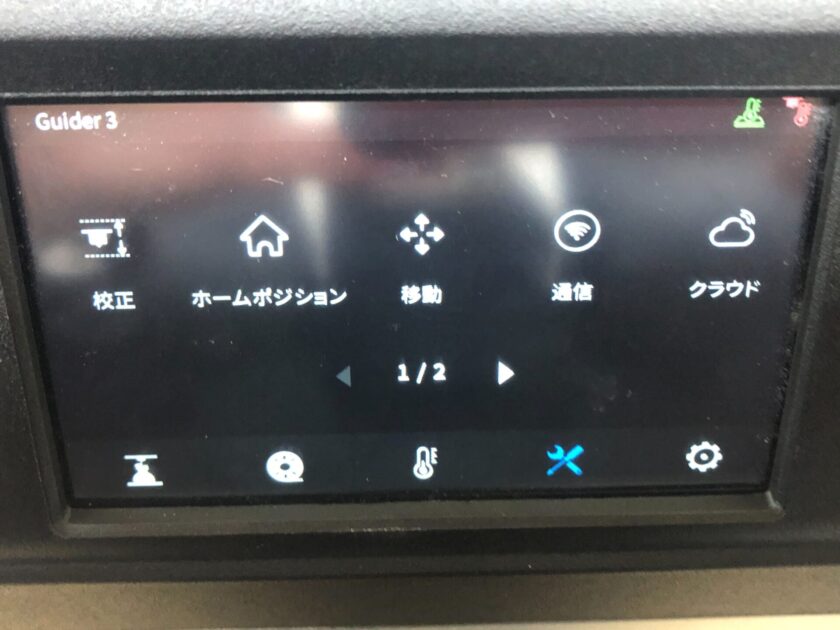
2. [ツール画面] -> [校正] をタッチします。
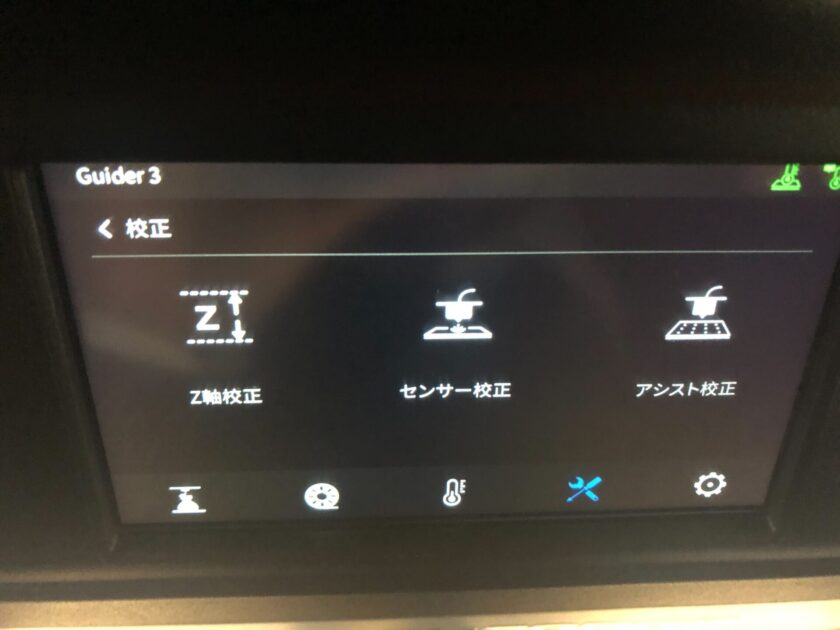
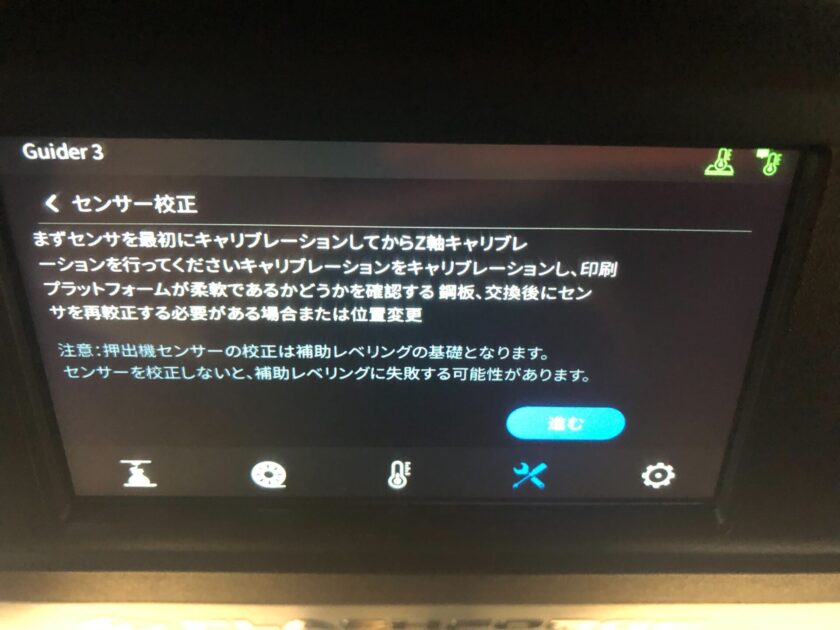
3. 真ん中の「センサー校正」を選択します。
4. 注意文が表示されます。こちらの文章につきましては「先にZ軸のキャリブレーションを行う」、
「センサーの位置を確認する」「フレキシブル鋼板プラットフォームを使用しているか」の確認です。
これらができていない場合はセンサー校正をすると不具合が発生する可能性があります。
準備ができている場合は[進む]をタッチしてください。
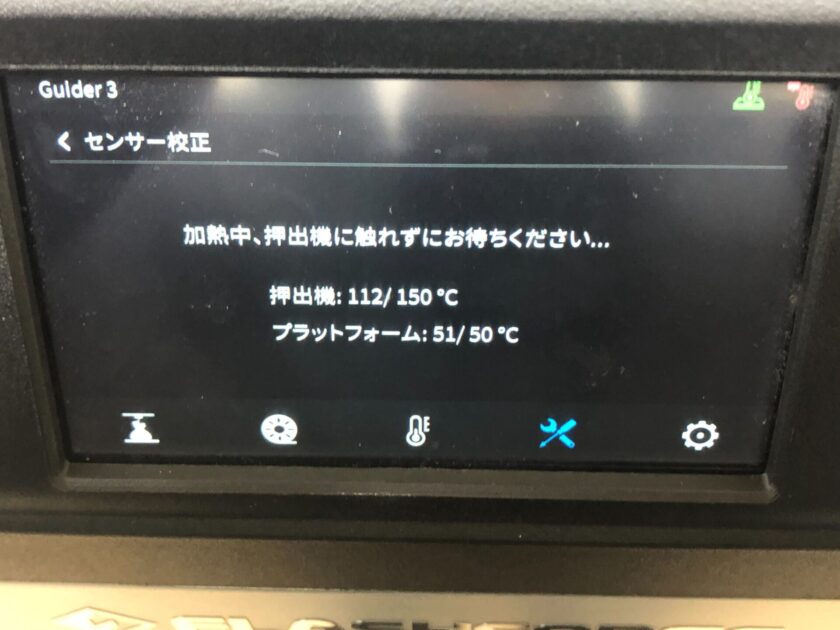
5. 「加熱中、押出機に触れずにお待ちください…」の表示と共に加熱が始まります。
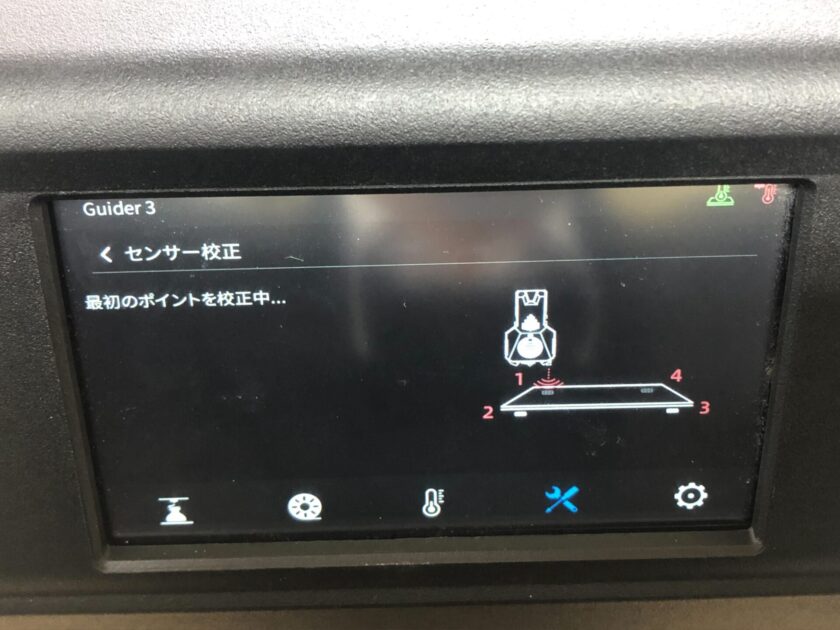
6. 加熱が設定された温度まで達すると「最初のポイントを校正中…」の表示になり、ヘッドが左奥に移動します。
センサーにより、ヘッドとプラットフォームの距離が計測されます。
この最初のポイントは自動で校正され、次に進みます。
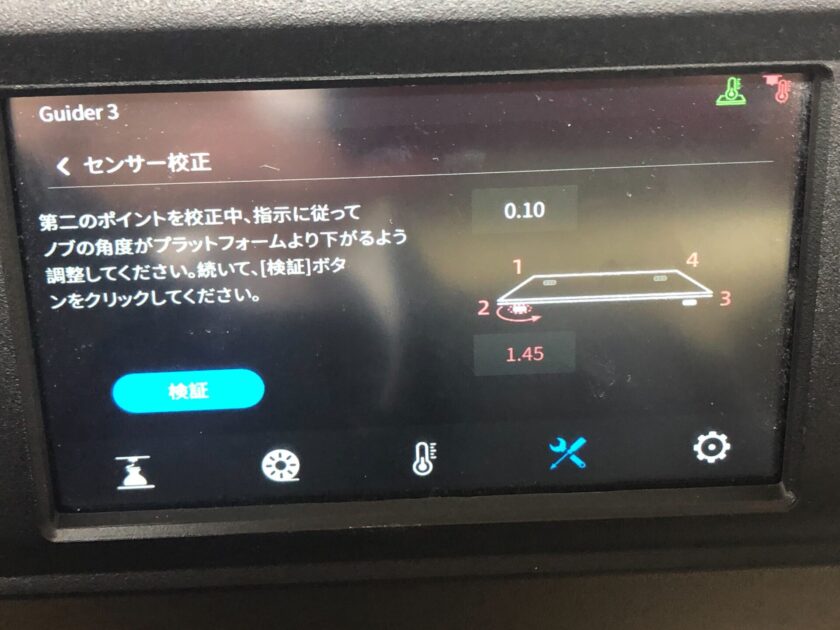
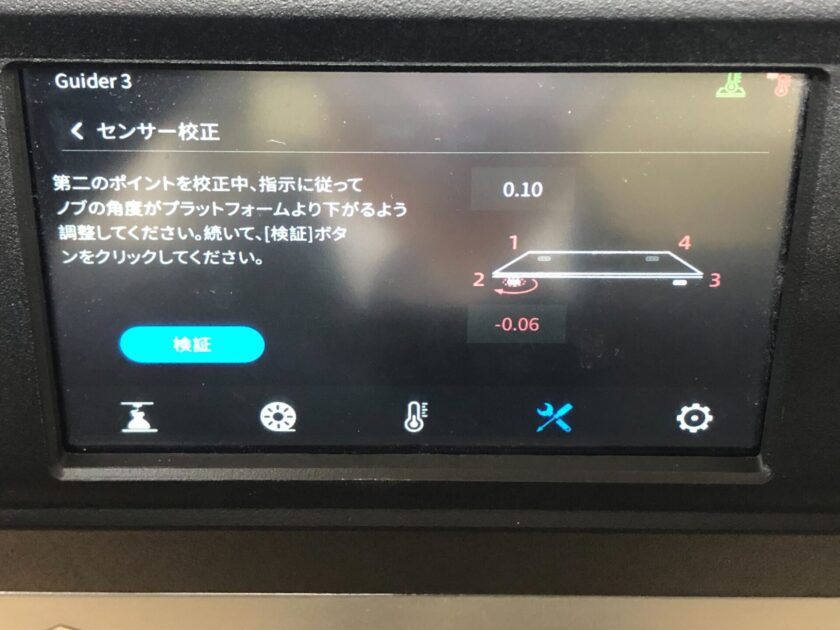
7. 次に第二ポイントである左手前にヘッドが移動し、計測が始まります。
ヘッドとプラットフォームの距離が近い、または遠い場合、下記画面のようになります。
画面の指示に従ってプラットフォーム下のネジを時計回りまたは反時計回りに回して調整してから[検証]をタッチしてください。
まだ、近かったり遠かったりする場合は再度同じような画面が表示されるので指示に従って調整してください。
良い位置に調整できると自動的に次のポイントに移動します。

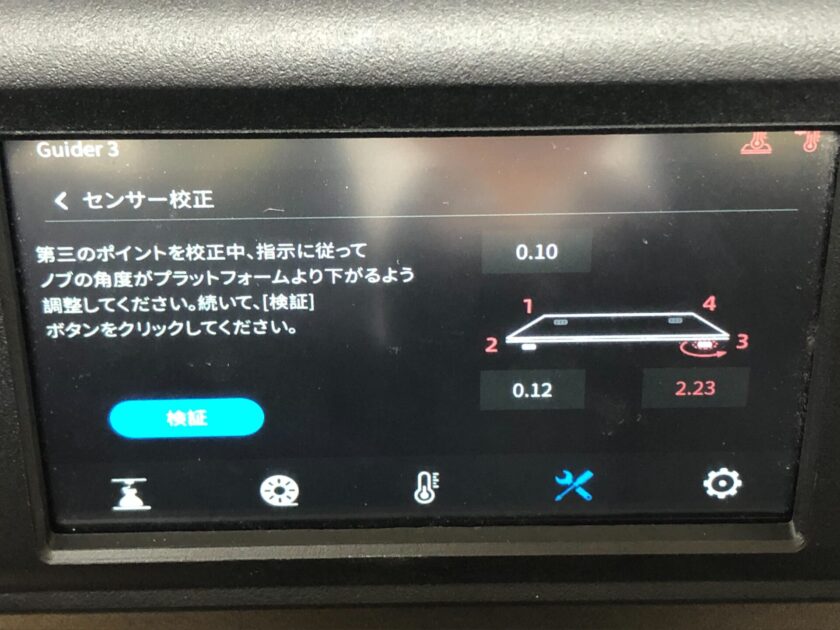
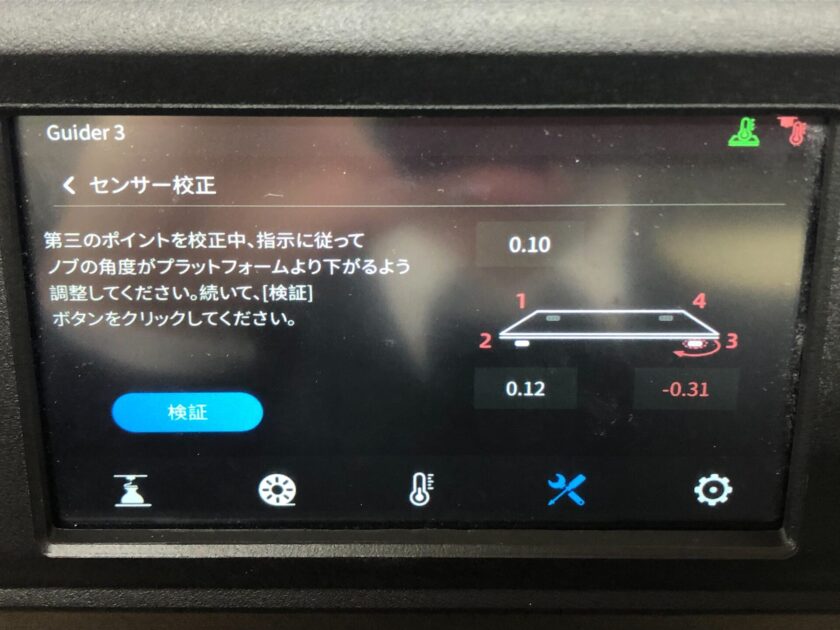
8. 第三ポイントの右手前にヘッドが移動し、計測が始まります。
先程と同様に画面の指示に従って調整を行ってください。
良い位置に調整できると自動的に次のポイントに移動します。
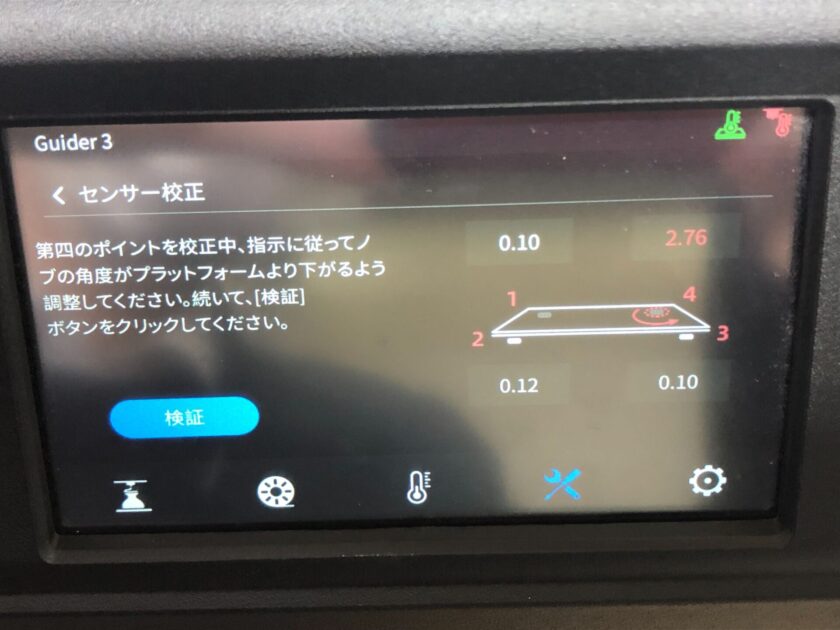
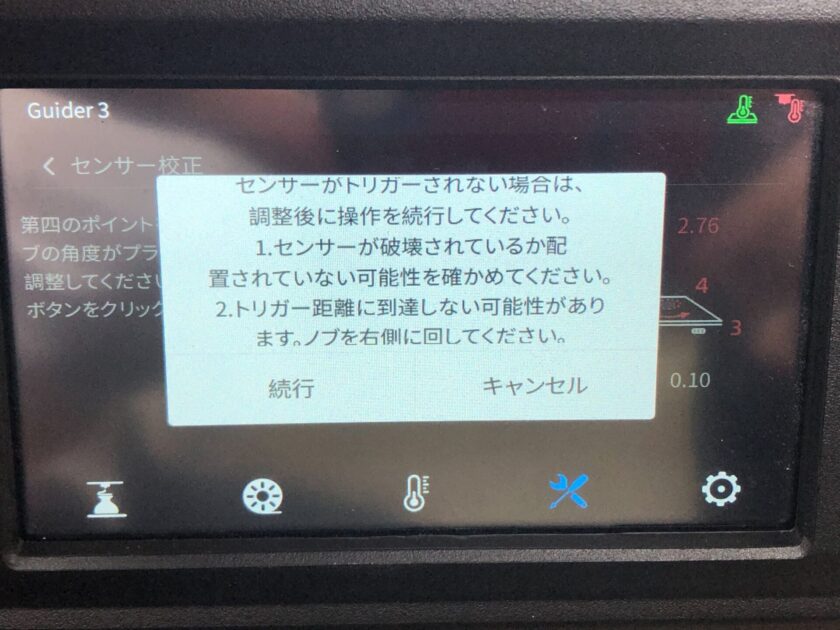
9. 最後の第四ポイントの計測が始まります。
7、8の手順と同様に画面の指示に従って調整を行ってください。
*センサーとプラットフォームの距離が遠すぎる、または不具合が発生し計測ができない場合、
下記画像のようなエラー表示が出る場合がございます。
この場合は時計周りにネジを回して、[続行]をタッチすると再度計測が始まります。
どれだけ回してもダメな場合はセンサーに不具合が発生している可能性が高くなります。
良い位置に調整できると「中央のポイントへ進む…」という表示共に中央辺りにヘッドが移動します。
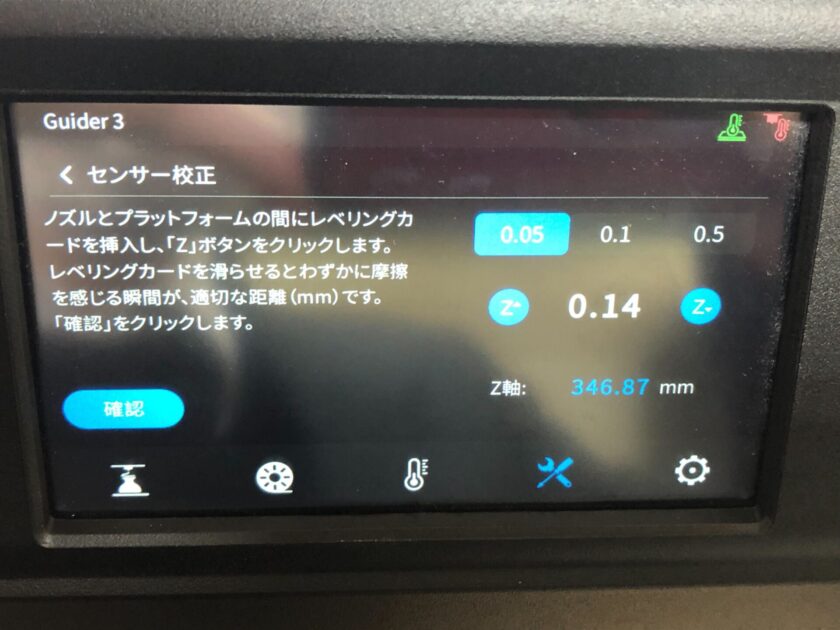
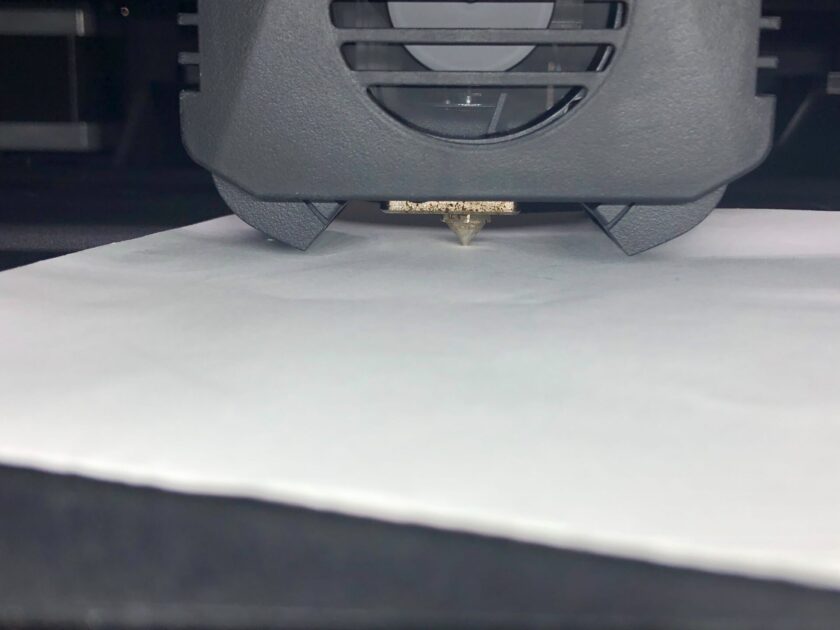
10. 中央のポイントへ移動したら、キャリブレーションカードまたはコピー用紙2枚分(厚さ約0.18mm)をヘッドとプラットフォームの間に挿入し、引くときに抵抗を感じるくらいに調整します。
調整が完了したら[確認]をタッチすると「ホーミング中、お待ちください…」の表示と共にヘッド、プラットフォームが原点に戻り、
水平出し、センサー校正が完了します。